|
Сегодня рассмотрим принцип подключения энкодера к ардуино. Энкодер служит для преобразования угла поворота в электрический сигнал. В результате пересчета, с высокой точностью, можно определить угол поворота вала шагового двигателя.
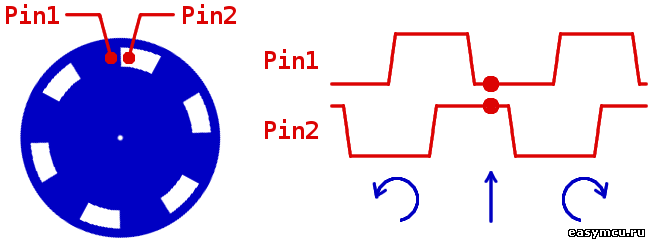
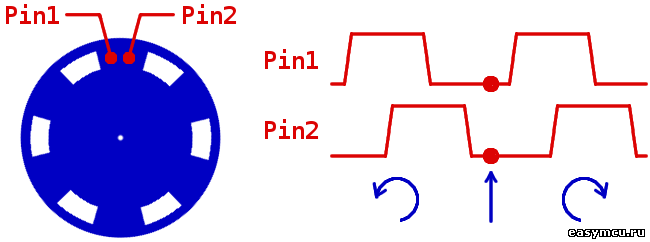
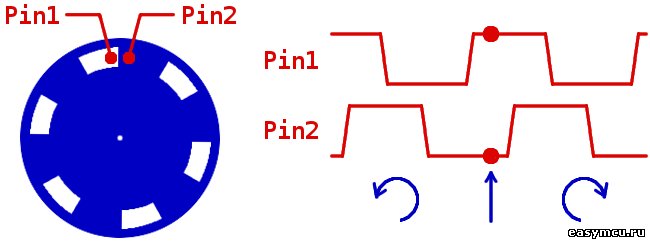
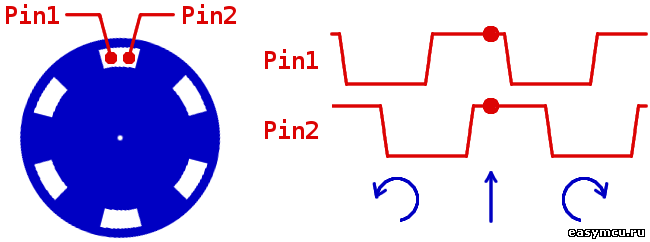
Свой экспериментальный энкодер я выпаял из автомагнитолы. Он имеет 4 состояния:
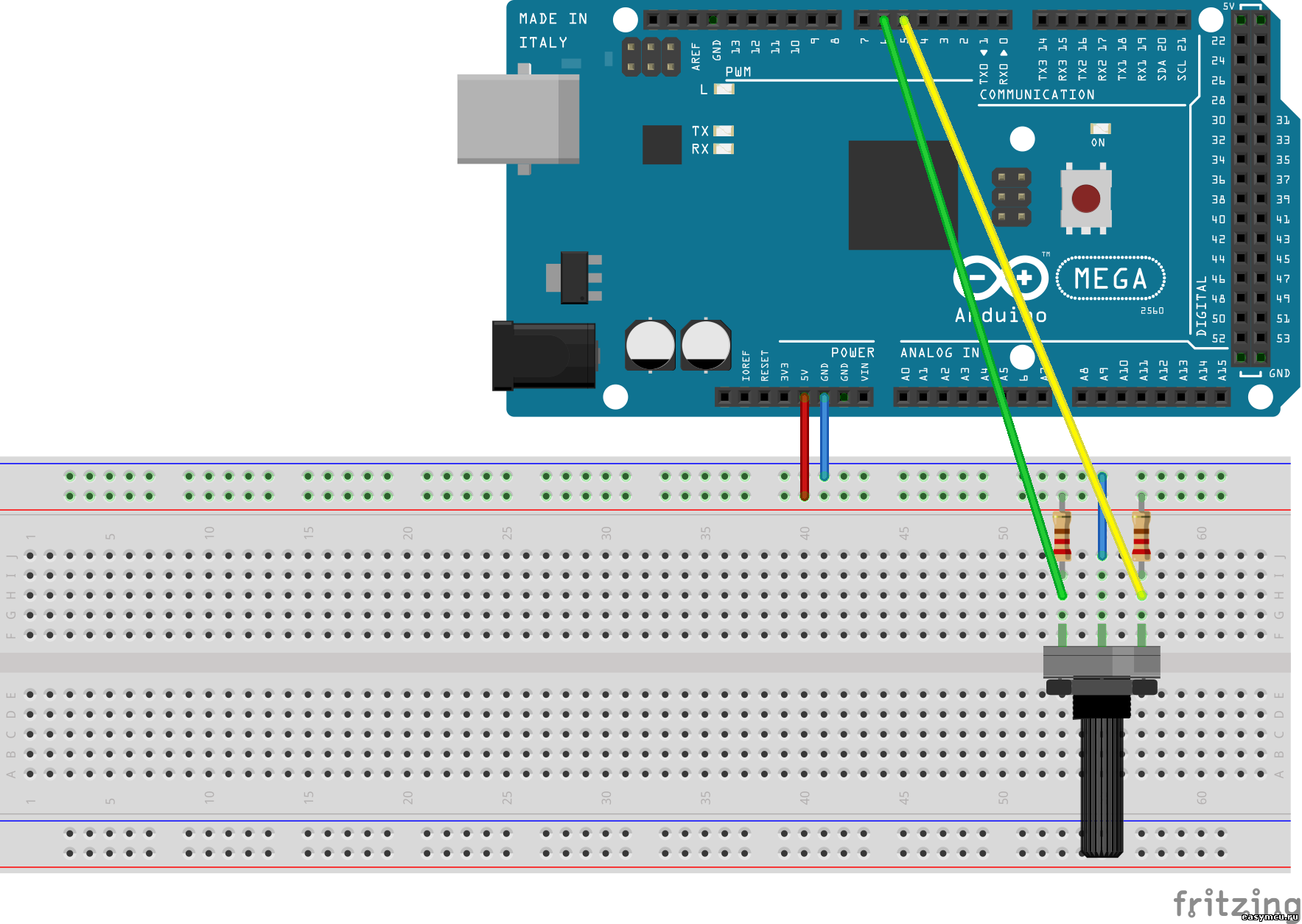
Энкодер подключаем по следующей схеме:
Теперь осталось подключить библиотеку для работы с энкодером. Скачать библиотеку Encoder.zip (version 1.2)
Все необходимое находится в этом архиве. А так же несколько примеров. Данная библиотека позволяет использовать одновременно два энкодера.
Пример программы:
/* Encoder Library - TwoKnobs Example
* http://www.pjrc.com/teensy/td_libs_Encoder.html
*
* This example code is in the public domain.
*/
#include <Encoder.h>
// Change these pin numbers to the pins connected to your encoder.
// Best Performance: both pins have interrupt capability
// Good Performance: only the first pin has interrupt capability
// Low Performance: neither pin has interrupt capability
Encoder knobLeft(5, 6);
Encoder knobRight(7, 8);
// avoid using pins with LEDs attached
void setup() {
Serial.begin(9600);
Serial.println("TwoKnobs Encoder Test:");
}
long positionLeft = -999;
long positionRight = -999;
void loop() {
long newLeft, newRight;
newLeft = knobLeft.read();
newRight = knobRight.read();
if (newLeft != positionLeft || newRight != positionRight) {
Serial.print("Left = ");
Serial.print(newLeft);
Serial.print(", Right = ");
Serial.print(newRight);
Serial.println();
positionLeft = newLeft;
positionRight = newRight;
}
// if a character is sent from the serial monitor,
// reset both back to zero.
if (Serial.available()) {
Serial.read();
Serial.println("Reset both knobs to zero");
knobLeft.write(0);
knobRight.write(0);
}
}
| 
